Abstract
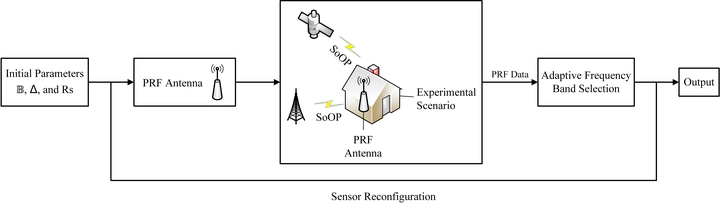
Passive radio frequency (PRF)-based indoor positioning systems (IPS) have attracted researchers’ attention due to their low price, easy and customizable configuration, and non-invasive design. This paper proposes a PRF-based three-dimensional (3D) indoor positioning system (PIPS), which is able to use signals of opportunity (SoOP) for positioning and also capture a scenario signature. PIPS passively monitors SoOPs containing scenario signatures through a single receiver. Moreover, PIPS leverages the Dynamic Data Driven Applications System (DDDAS) framework to devise and customize the sampling frequency, enabling the system to use the most impacted frequency band as the rated frequency band. Various regression methods within three ensemble learning strategies are used to train and predict the precise positions of the receiver. The PRF spectrum of 60 positions is collected in the experimental scenario, and three criteria are applied to evaluate the performance of PIPS. Experimental results show that the proposed PIPS possesses the advantages of high accuracy, configurability, and robustness.